Viobot算法运行基本参数配置
设备出厂默认设置都是室内的运行参数,基本能够保证在室内场景下运行良好并有一个比较不错的精度表现。一般来说我们修改设置都是修改相机的曝光相关的,以及算法的深度相关参数,建议修改的数据是常规亮度和点云最大深度。
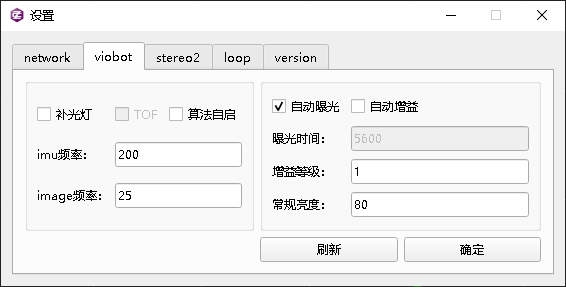
1.室内配置
如果室内场景灯光比较亮,或者是窗户比较多,通光比较好的话,可以将常规亮度设置为90~95,其他条件下基本设置成下面这样就行。
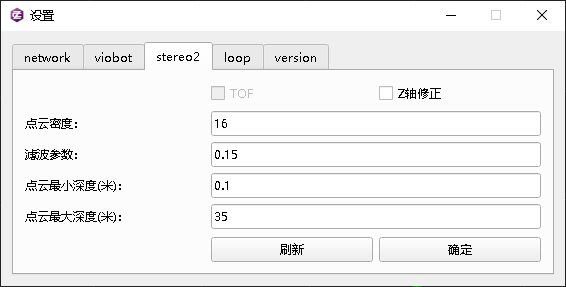
这里说明一下Z轴修正开关,这是一个Z轴漂移补偿的开关,当运行环境比较平整,没有太大的上下坡度的时候可以开启,开启后算法会将Z轴的漂移量跟xy的平移量做整合,得到一个没有Z轴漂移的位姿。
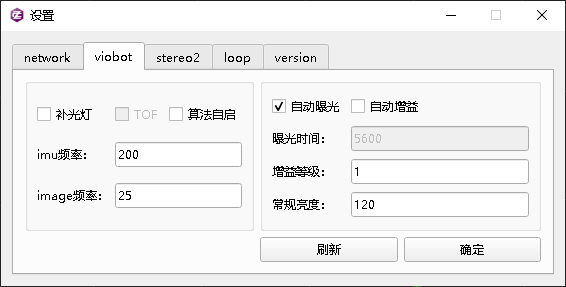
2.室外配置
室外一般亮度本身会比室内高一些,我们可以把常规亮度设置的相对高一些,可以参考下面的配置

点云最大深度可以看场景的开阔程度,如果30~50米内基本都有比较高的参照物时,可以设置为100~150,当场景特别开阔可以设置到200以上。
3.其他场景配置
其他一些场景下还需要用户看一下设备算法的基本运行情况,做出相应的修改,如果是亮度特别低的场景,建议开启补光灯或者自己增加一个补光灯设备,使得设备有一个比较清晰的成像。