Viobot ROS多主机配置
主要是针对ROS版本下的,因为ROS本身master节点只能够有一个,如果把个人电脑设置为主机,把viobot设置为从机的话,设备本身的程序启动会一直寻找主机,导致很多功能不能正常使用。只有在个人电脑正常运行,能够设备稳定通信,而且开启了ROS master的情况下才能使用,限制比较大,现介绍一种方法,能够让你的个人电脑配置了从机之后,在不连接viobot的情况下也能够正常使用ROS的功能。
这就是multmaster fkie,截图GPT的回答:
以下教程以ubuntu20.04 + ROS Noetic为例。
设备1为我的虚拟机IP:10.21.0.245,设备2为Viobot IP:10.21.0.208
1.分别编译multmaster fkie
(1)首先配置虚拟机环境
编译multmaster fkie
mkdir -p mult_master/src
cd mult_master/src
git clone https://github.com/fkie/multimaster_fkie.git multimaster
#如果git clone下载太慢的话,也可以直接上github下载压缩包下来,拉到虚拟机和Viobot里面解压
#安装依赖
pip3 install grpcio
pip3 install grpcio-tools
cd ..
catkin build
#如果catkin build命令报错的话,需要手动安装catkin build
#sudo apt install python-catkin-tools
(2)编译Viobot的环境
此步骤需要确保Viobot的网络配置在一个能够联网的IP段
mkdir -p mult_master/src
cd mult_master/src
git clone https://github.com/fkie/multimaster_fkie.git multimaster
#如果git clone下载太慢的话,也可以直接上github下载压缩包下来,拉到虚拟机和Viobot里面解压
sudo apt update
sudo apt install python3-pip
pip3 install --upgrade setuptools
pip3 install grpcio
pip install grpcio-tools
cd ..
catkin build
2.配置网络环境
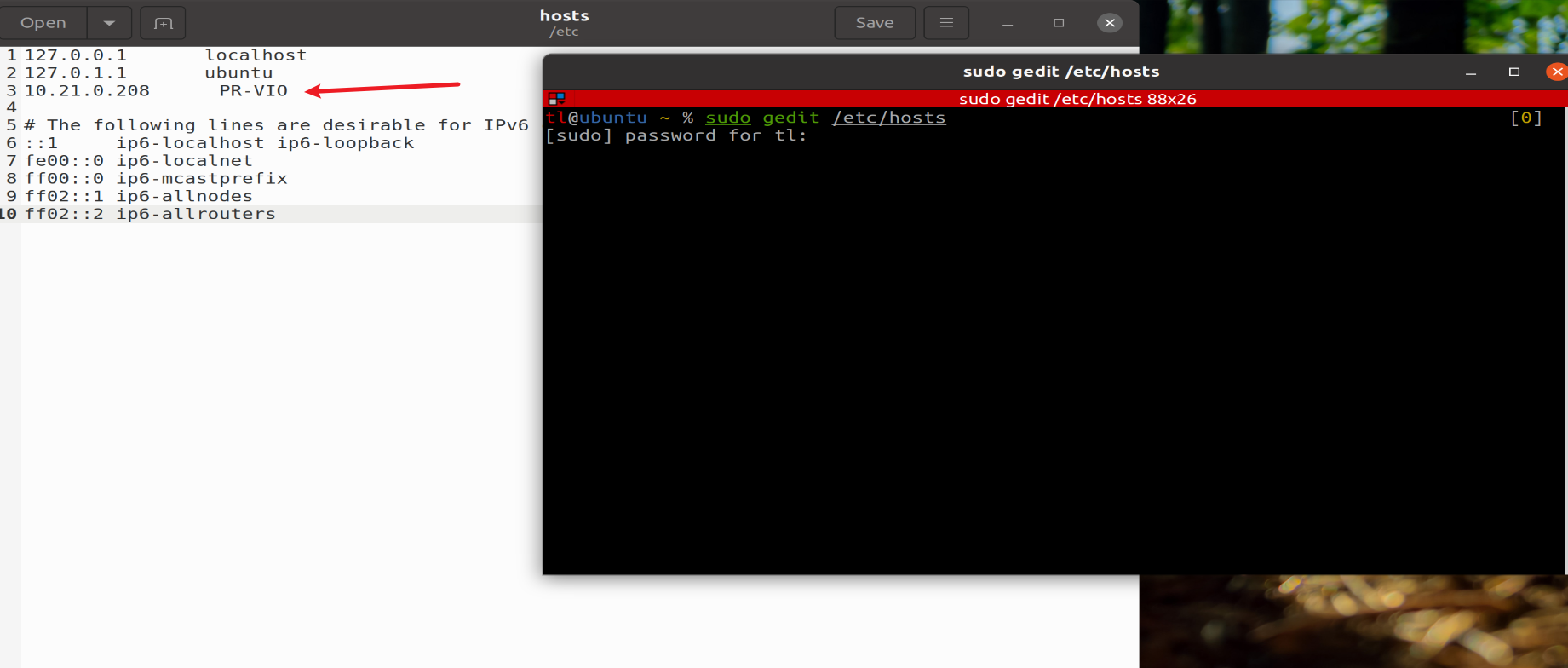
(1)虚拟机添加host
sudo gedit /etc/hosts
添加Viobot的IP和hostname
(2)Viobot添加host
sudo vim /etc/hosts
添加虚拟机的IP和hostname

3.增加网络配置
下面的操作两者都做一遍即可
sudo vim /etc/sysctl.conf #shift+g跳转到最后一行,o添加,然后加上下面的两行,保存退出
net.ipv4.ip_forward=1 #启用 IP 数据包转发,允许 Linux 系统作为路由器来转发数据包。
net.ipv4.icmp_echo_ignore_broadcasts=0 #允许系统响应广播 ICMP 回显请求。
#回到终端重新启动 procps 服务
sudo service procps restart
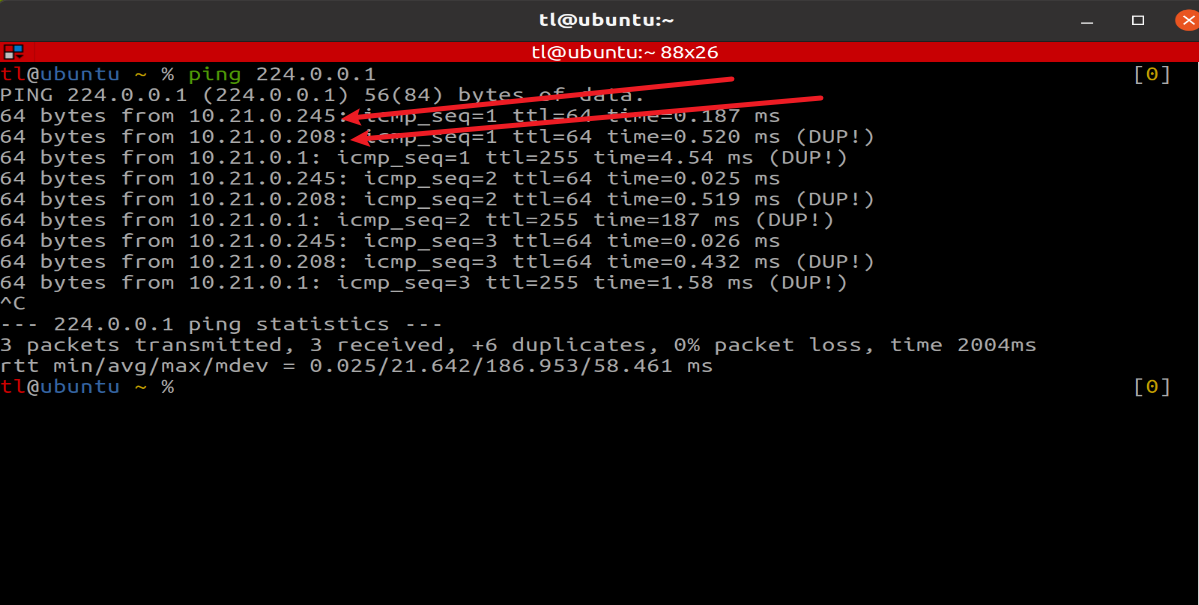
两边都做完可以测试以下广播是否生效
ping 224.0.0.1
虚拟机:
Viobot:
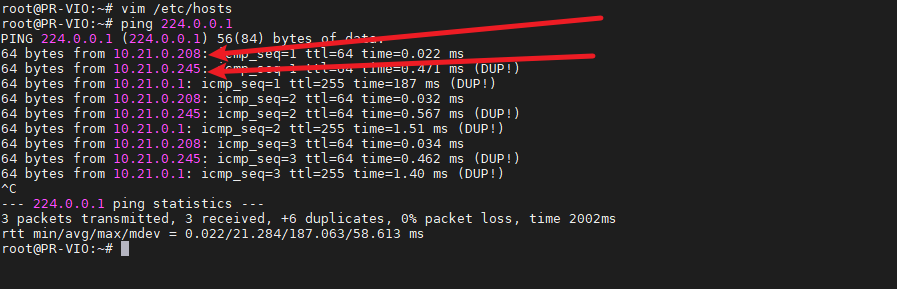
如果都能够看到彼此的IP即配置完成
4.测试multmaster多机通信
由于Viobot设备自启动有一个master节点和传感器的数据读取,所以不需要另外再启动其他节点
虚拟机操作:
第一个终端
roscore
第二个终端
cd mult_master
source ./devel/setup.bash
rosrun fkie_master_discovery master_discovery
第三个终端
cd mult_master
source ./devel/setup.bash
rosrun fkie_master_sync master_sync
Viobot操作:
cd mult_master
source ./devel/setup.bash
rosrun fkie_master_discovery master_discovery
所有东西都开起来后,就可以在虚拟机端,看到Viobot的话题了。
虚拟机新开终端,打开rqt就可以看到画面了。